

轻量型智能实训机械臂 一站式 STEAM 教育综合平台
产品功能:
1.全球首款桌面协作机器人,具备 3D 打印、激光雕刻、写字画画等多种功能,预留 13 个拓展接口支持二次开发,同时提供丰富的实验项目和完善的课程体系。
2.使用 Magician 智能机器人,可开展机器人系统认识、机器人 D-H 模型认识、机器人基本运动控制、机器人程序编辑等课程的教学实践。通过软件编程并结合硬件拓展来开发更多的应用场景,满足不同层次学生的需求。
产品特点:
1.人手一机,操作简单
体积精巧,一体化的设计,PC 端控制、APP 控制、无线控制等多种操作方式随意切换,人手一机,让每个学生通过实操练习获得更好的学习体验。
2.二次开发,拓展性强
预留 13 个拓展接口和一个可编程按键,用户可通过 DobotLab 进行脚本编程来开发更多功能。
3.多种配件,自由组合
可灵活搭配滑轨、传送带、智能小车、视觉等配件,根据不同需求完成不同实训项目。
应用场景:
1.教育领域
(1)教学实践:教育机械臂可以教学生们组建机器人,锻炼他们对智能制造关键流程的构建能力。通过互动性、趣味性教学内容,培养学生的逻辑思维能力、动手能力和创造力。例如在学校的机器人兴趣小组或者科技课程中,学生可以通过操作魔术师机械臂直观地了解机器人的运动原理、编程逻辑等知识。
(2)AI教育:构建微缩的沉浸式应用场景,帮助学生更好地理解AI +机器人在现实工作生活中的应用,进而促进孩子对现实问题的思考。基于其软硬件交互方式及多样化兼容拓展接口,孩子们可以在定制化教育内容的引导下实现更多创意,建立对机器人及其在实际工作生活中应用的初步认识等。
2.商业领域
(1)餐饮服务:可以帮助商家来冲咖啡、制作煎饼果子等。例如在一些现代化的餐厅或者咖啡店内,MZXZ-Magician桌面协作机器人可以按照预设的程序制作饮品或者简单食物,为顾客提供新颖的消费体验,同时也能提高商家的工作效率。
(2)商品制作与加工:例如3D打印等工作。在一些创意工作室或者小型制造车间,MZXZ-Magician桌面协作机器人可以根据设定的模型进行3D打印操作,制作一些个性化的产品或者零部件。
3.工业领域
(1)电子元件组装:在3C行业中,一些小型电子元件的组装工作可以由MZXZ-Magician桌面协作机器人完成。它可以精准地抓取微小的电子元件,并将其安装到对应的位置上,提高组装的准确性和效率。
(2)产品质量检测:可以对生产线上的产品进行外观检测或者简单的性能检测。例如检测产品表面是否有划痕、尺寸是否符合标准等,通过机械臂上安装的检测设备(如摄像头等)对产品进行扫描检测,并将结果反馈给生产系统。
4.创意与娱乐领域
(1)写字画画:凭借其多种功能,它可以进行写字画画创作。在一些艺术展览或者创意活动中,可以利用机械臂创作出独特的书法或者绘画作品,吸引观众的目光。
(2)激光雕刻:能够进行激光雕刻操作,在一些工艺品制作或者个性化定制礼品制作场景下,可以根据设计图案在不同材质(如木材、塑料、皮革等)上进行雕刻,制作出个性化的产品。
可以解决什么问题:
1.提高操作精准度:MZXZ-Magician桌面协作机器人具有较高的重复定位精度,这意味着在一些需要精细操作的任务中,它能够比人工操作更精准地完成任务。例如在一些科研实验中的样本操作、电子元件的微小部件组装等场景下,人工操作可能会因为手部抖动或者视觉误差等因素导致操作失误,而MZXZ-Magician桌面协作机器人能够按照预设程序精准地完成动作,减少误差。
2.提升工作效率:它可以实现自动化操作流程,不需要休息,可以持续工作。比如在工业生产中的一些简单装配任务,机器人可以按照固定的流程快速完成操作,相比人工操作可以大大提高单位时间内的产出数量。而且它可以通过程序设定同时控制多台机械臂协同工作,进一步提升整体的工作效率。
3.降低人力成本:在一些简单、重复性高的工作场景中,使用MZXZ-Magician桌面协作机器人可以减少对人力的依赖。例如在某些产品的质量检测环节,如果使用人工检测需要大量的人力投入,并且容易因为人的疲劳等因素导致检测结果不稳定,而机器人可以长时间稳定地进行检测工作,从而降低企业在这方面的人力成本投入。
4.减少人工操作风险:在一些危险环境下(如高温、有毒、辐射、易受伤等环境)的操作任务,使用MZXZ-Magician桌面协作机器人可以避免人工直接接触危险环境,保障操作人员的安全。
产品参数配置:
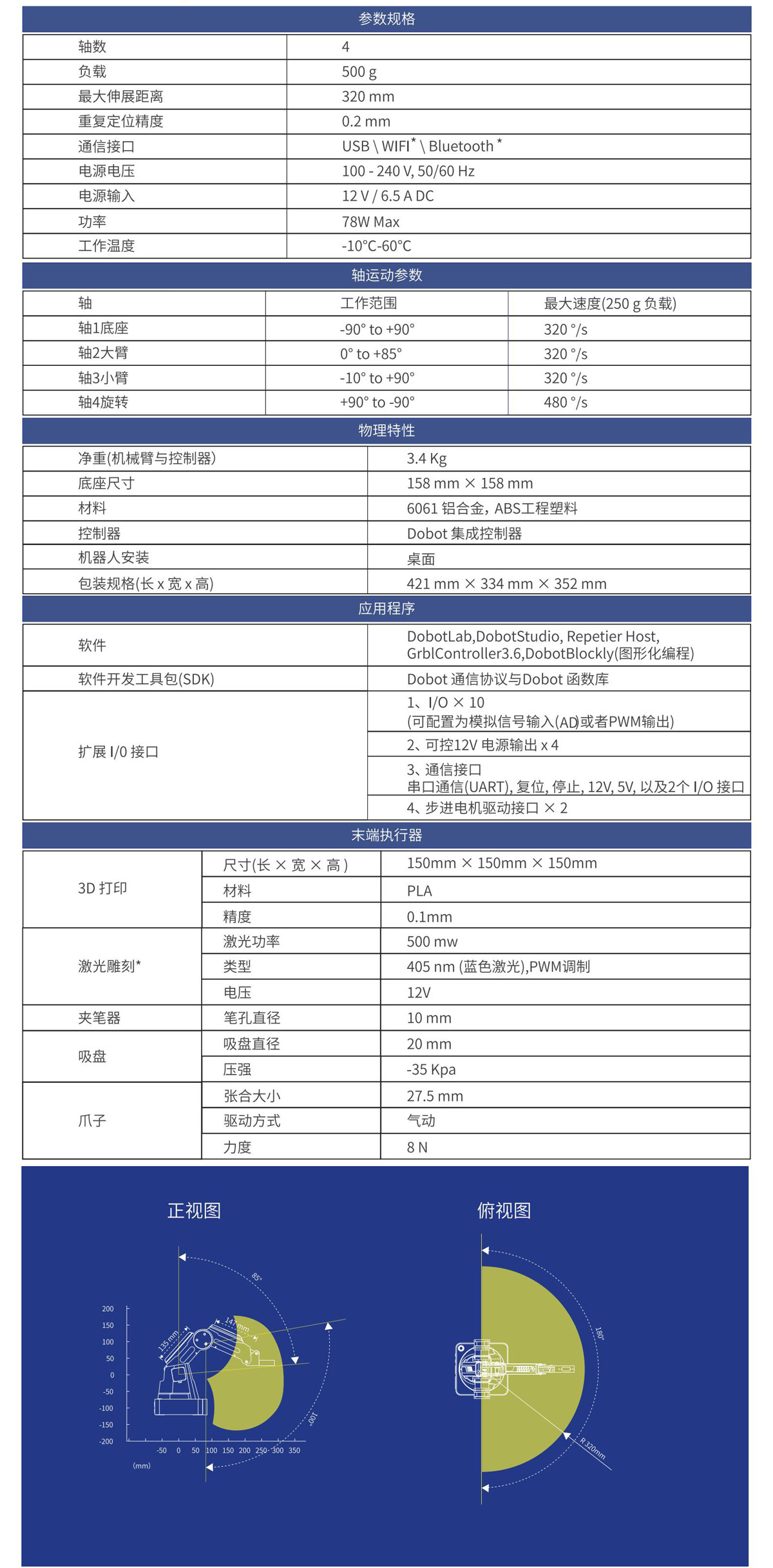
| 参数规格 | ||
| 轴数 | 4 | |
| 有效荷重 | 500 g | |
| 最大伸展距离 | 320 mm | |
| 重复定位精度 | ±0.2 mm | |
| 通信接口 | USB / Wi-Fi* / Bluetooth* | |
| 电源电压 | 78W Max | |
| 功率 | 12 V / 6.5 A DC | |
| 工作环境 | -10 °C - 60 °C | |
| 轴运动参数 | ||
| 轴 | 工作范围 | 最大速度 (250 g负载) |
| 轴1底座 | -120 ° ~ +120 ° | 320 ° / s |
| 轴2大臂 | -5 ° ~ +90 ° | 320 ° / s |
| 轴3小臂 | -15 ° ~ +90 ° | 320 ° / s |
| 轴4旋转 | -140 ° ~ +140 ° | 480 ° / s |
| 物理特性 | ||
| 净重(机械手与控制器) | 3.4 KG | |
| 套装毛重 (标准版) | 7.2 KG | |
| 套装毛重 (教育版) | 8.0 KG | |
| 底座尺寸 | 158 mm × 158 mm | |
| 材料 | 6061 铝合金, ABS 工程塑料 | |
| 控制器 | Dobot 集成控制器 | |
| 机器人安装 | 桌面 | |
| 包装规格(长×宽×高) | 421 mm x 334 mm x 352 mm | |
| 应用程序 | ||
| 软件 | DobotLab, DobotStudio, Repetier Host, GrblController 3.6, DobotBlockly (图形化编程) | |
| SDK (软件开发工具包) | Dobot 通信协议与 Dobot 函数库 | |
| 可扩展 I/O 接口 | 1. I/O × 10 (可配置为模拟信号输入( AD )或者 PWM 输出) | |
| 2. 可控 12 V 电源输出 × 4 | ||
| 3. 通信接口(串口通信【 UART 】, 复位, 停止, 12 V, 5 V, 以及 2 个 I/O 接口) | ||
| 4. 步进电机驱动接口 × 2 | ||
| 末端执行器 | ||
| 3D 打印 | 最大尺寸(长× 宽 × 高) | 最大 150 mm × 最大 150 mm × 最大 150 mm |
| 材料 | PLA | |
| 精度 | 0.1 mm | |
| 激光雕刻 | 激光功率 | 500 mw |
| 类型 | 405 nm (蓝色激光), PWM 调制 | |
| 电压 | 12 V | |
| 夹笔器 | 笔孔直径 | 10 mm |
| 吸盘 | 吸盘直径 | 20 mm |
| 压强 | -35 Kpa | |
| 爪子 | 张合大小 | 27.5 mm |
| 驱动方式 | 气动 | |
| 力度 | 8 N | |
| 带*号的选项为可选套件,不包含在默认套餐当中 | ||
 鄂公网安备42011502001751
鄂ICP备2024079111号XML地图
鄂公网安备42011502001751
鄂ICP备2024079111号XML地图 
 微信二维码
微信二维码