
产品简介:
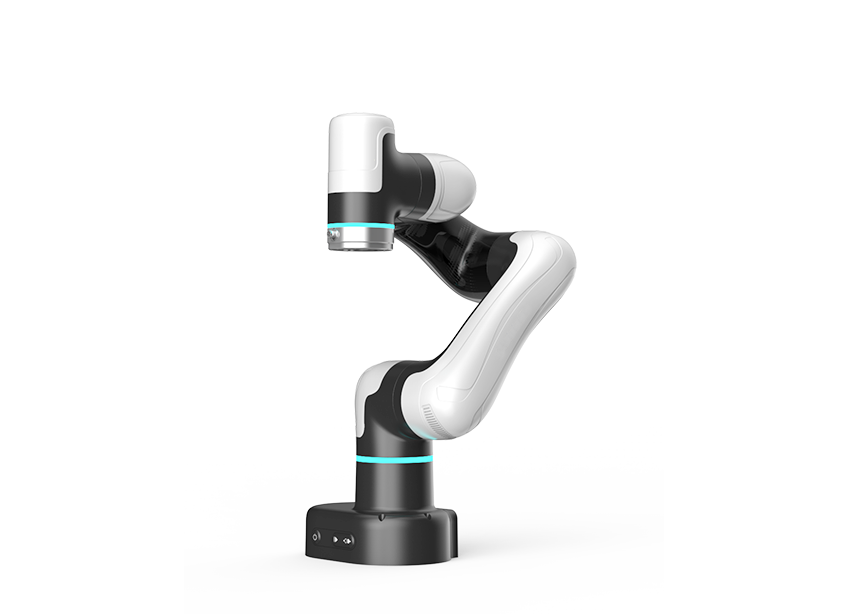
这是一款专为教育与研究开发的桌面六轴协作机器人,具有工业机器人的性能,支持多样化的工业拓展配件,可真实还原自动化应用场景,创造沉浸式教研体验。MZXZ-E6桌面六轴协作机器人提供了丰富的二次开发接口,量身打造涵盖机器人结构和控制原理的课程体系,为教学与科研打开了创新的大门,为人工智能、智能制造等领域科教提供了最佳的实践平台。
产品特点:
1.安全性高:流线型机身设计结合碰撞检测功能,操作更安全,搭配圆环指示灯,实时掌握机器人的运行状况,有效降低用户碰撞风险。
2.安装简单:机身小巧,重量轻,摆放在桌面上即可启动安装,简单灵活,机器人与控制器一体化设计,免去了复杂的连线,插电即用。
3.快速上手:基于自研的轨迹复现技术,通过拖动示教,轻松完成轨迹录制,支持图形化编程,零基础快速上手,简单易用,人人可操作。
应用场景:
1. 教育与研究
这款MZXZ-E6桌面六轴协作机器人的设计初衷是为了满足教育和研究的需求。它具有轻巧的外观和易于上手的操作特性,适合在学校和研究机构中使用。它可以用于教授机器人技术和自动化原理,同时也适合进行各种科研实验项目。
2. 工业自动化
尽管 MZXZ-E6桌面六轴协作机器人是一款桌面级机器人,但它具备工业级的性能水平,如500g负载和±0.1mm的重复定位精度。这些特性使得它能够模拟大部分常用的工业自动化项目,真实还原生产线场景,从而帮助教育与产业的对接更进一步。
3. 智能制造
MZXZ-E6桌面六轴协作机器人支持多种编程语言和开源平台,如 ROS、Python 和 C++,这使得它可以适应智能制造领域的各种需求。它的可拓展性允许用户开发出更多样化的功能,如点胶、锁螺丝等。
4. 科研实验
由于MZXZ-E6桌面六轴协作机器人具有较高的灵活性和拓展性,它可以支持完成更复杂的科研实验项目。越疆公司还将开发涵盖机器人基础认知教学和工业应用场景的实训教学,以及科研方面的多样化课程资源,为人工智能、智能制造相关专业提供最佳实践平台。
可以解决哪些问题:
1. 教育领域的机器人技术普及
Magician E6 的易用性和安全性使其成为教育领域推广机器人技术的理想工具。它可以降低学生和研究人员接触和学习机器人技术的门槛,促进技术创新和人才培养。
2. 工业自动化项目的模拟与测试
在工业自动化领域,Magician E6 可以用来模拟生产线上的自动化项目,帮助企业进行前期的测试和验证,减少实际生产中的风险和成本。
3. 智能制造的灵活性与效率提升
对于智能制造企业来说,Magician E6 的高灵活性和拓展性可以帮助它们快速开发和部署新的智能制造解决方案,提高生产效率和产品质量。
4. 科研实验的便捷性与多样性
在科研领域,Magician E6 提供了一个便捷的平台,可以让研究人员进行多样化的实验和探索,加速科技成果的转化和应用。
产品参数:
| 本体重量 | ≤7.2 kg | |
| 机器人轴数 | 6 | |
| 最大负载 | 750 g | |
| 最大工作半径 | 450 mm | |
| 重复定位精度 | ±0.1 mm | |
| 末端最大工作速度 | 0.5 m/s | |
| 关节运动范围 | J1 | ±360° |
| J2 | ±135° | |
| J3 | ±154° | |
| J4 | ±160° | |
| J5 | ±173° | |
| J6 | ±360° | |
| 单轴最大运动速度 | 120°/s | |
| 电源输入 | 100V~240V AC,50/60 Hz | |
| 额定电压 | 48V DC,5A | |
| 额定功率 | 130W | |
| 通信接口 | Ethernet | 2个,用于 TCP/IP 和 Modbus TCP 通信 |
| IO 接口 | 末端 | DI x 2,DO x 2,24V x 1,GND x 1 |
| 底座 | DI x 16,DO x 16,24V x 4,GND x 4 | |
| I/O 输出 | 24V,总输出 2A,单路最大 0.5A | |
| 外部接口 | 急停开关 x 1,ABZ 编码器接口 x 1,电源接口 x 1 | |
| 控制软件 | DobotStudio Pro | |
| IP等级 | IP20 | |
| 底座尺寸 | 162 mm x 120 mm x 103 mm | |
| 工作环境 | 温度:0°C ~ 40°C, 湿度:25% ~ 85%,非冷凝 | |
| 噪音 | 60dB(A) | |
| 安装 | 台面安装 | |
| 材料 | 铝合金、ABS 塑料 | |
 鄂公网安备42011502001751
鄂ICP备2024079111号XML地图
鄂公网安备42011502001751
鄂ICP备2024079111号XML地图 
 微信二维码
微信二维码